|
GT RoboCup SSL
Soccer software, robot firmware
|
|
GT RoboCup SSL
Soccer software, robot firmware
|
Finds the best position to kick to and the chance of success. More...
Public Member Functions | |
| KickEvaluator (SystemState *systemState) | |
| Constructor. More... | |
| KickResults | eval_pt_to_pt (Geometry2d::Point origin, Geometry2d::Point target, float targetWidth) |
| Evaluates kick to target point. More... | |
| KickResults | eval_pt_to_robot (Geometry2d::Point origin, Geometry2d::Point target) |
| Evaluates kick to target robot. More... | |
| KickResults | eval_pt_to_opp_goal (Geometry2d::Point origin) |
| Evaluates kick to opponent goal. More... | |
| KickResults | eval_pt_to_our_goal (Geometry2d::Point origin) |
| Evaluates kick to our goal. More... | |
| KickResults | eval_pt_to_seg (Geometry2d::Point origin, Geometry2d::Segment target) |
| Evaluates kick to target segment. More... | |
Static Public Member Functions | |
| static std::tuple< float, float > | eval_calculation (float x, const float kmean, const float kstdev, const std::vector< float > &robotMeans, const std::vector< float > &robotStDevs, const std::vector< float > &robotVertScales, const float bLeft, const float bRight) |
| Evaluates closed form solution of the KickEvaluation problem. More... | |
| static void | createConfiguration (Configuration *cfg) |
| Initializes configurable fields. More... | |
Public Attributes | |
| std::vector< Robot * > | excluded_robots |
| Robots that should not be consider obstacles. | |
| std::vector< Geometry2d::Point > | hypothetical_robot_locations |
| Locations to pretend are robot obstacles during evaluation. | |
Static Public Attributes | |
| static ConfigDouble * | kick_std_dev |
Finds the best position to kick to and the chance of success.
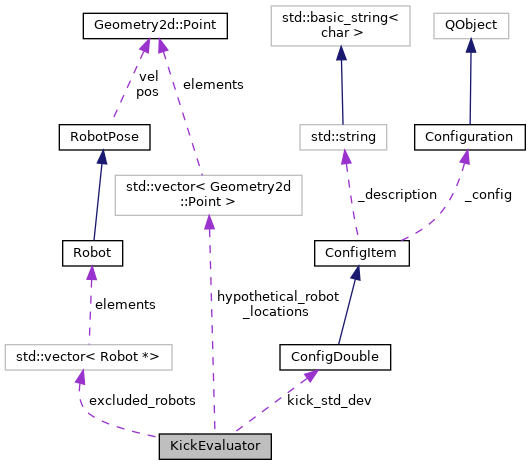
 Collaboration diagram for KickEvaluator:
Collaboration diagram for KickEvaluator:| KickEvaluator::KickEvaluator | ( | SystemState * | systemState | ) |
Constructor.
| systemState,pointer | to the global system state object |
|
static |
Initializes configurable fields.
|
static |
Evaluates closed form solution of the KickEvaluation problem.
| x,Location | to run at |
| kmean,Kick | mean |
| kstdev,Kick | standard deviation |
| robotMeans,vector | of robot angle locations |
| robotStDevs,vector | of robot movement standard deviations |
| robotVertScales,vector | of how much to scale the height |
| bLeft,left | boundary angle |
| bRight,right | boundary angle |
| KickResults KickEvaluator::eval_pt_to_opp_goal | ( | Geometry2d::Point | origin | ) |
Evaluates kick to opponent goal.
| origin,Starting | point of the kick |
| KickResults KickEvaluator::eval_pt_to_our_goal | ( | Geometry2d::Point | origin | ) |
Evaluates kick to our goal.
| origin,Starting | point of the kick |
| KickResults KickEvaluator::eval_pt_to_pt | ( | Geometry2d::Point | origin, |
| Geometry2d::Point | target, | ||
| float | targetWidth | ||
| ) |
Evaluates kick to target point.
| origin,Starting | point of the kick |
| target,End | point of the kick |
| targetWidth,Width | of target in radians |
| KickResults KickEvaluator::eval_pt_to_robot | ( | Geometry2d::Point | origin, |
| Geometry2d::Point | target | ||
| ) |
Evaluates kick to target robot.
| origin,Starting | point of the kick |
| target,Target | robot location |
| KickResults KickEvaluator::eval_pt_to_seg | ( | Geometry2d::Point | origin, |
| Geometry2d::Segment | target | ||
| ) |
Evaluates kick to target segment.
| origin,Starting | point of the kick |
| target,End | segment of the kick |
 1.8.13
1.8.13