|
GT RoboCup SSL
Soccer software, robot firmware
|
|
GT RoboCup SSL
Soccer software, robot firmware
|
This class contains the motion constraints that the high-level logic sets for a robot. More...
Static Public Member Functions | |
| static double | defaultMaxSpeed () |
| Default constraint values supplied by config. | |
| static void | createConfiguration (Configuration *cfg) |
Public Attributes | |
| double | maxSpeed |
| Each instance has a set of speed/acceleration limits that are used for path following They default to the global config values defined below, but can be overridden by setting these. More... | |
| double | maxAcceleration |
| double | maxCentripetalAcceleration |
Static Public Attributes | |
| static ConfigDouble * | _max_acceleration |
| static ConfigDouble * | _max_centripetal_acceleration |
| static ConfigDouble * | _max_speed |
| static ConfigDouble * | _replan_threshold |
| static ConfigDouble * | _replan_lead_time |
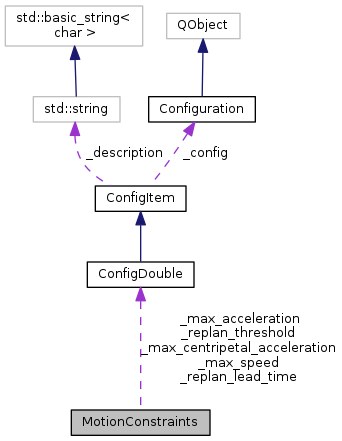
This class contains the motion constraints that the high-level logic sets for a robot.
For position: set EITHER OR . For angle: set EITHER OR .
 Collaboration diagram for MotionConstraints:
Collaboration diagram for MotionConstraints:| double MotionConstraints::maxSpeed |
Each instance has a set of speed/acceleration limits that are used for path following They default to the global config values defined below, but can be overridden by setting these.
This is useful for going slower while carrying the ball or when trying to do precise movements.
 1.8.13
1.8.13