|
GT RoboCup SSL
Soccer software, robot firmware
|
|
GT RoboCup SSL
Soccer software, robot firmware
|
Encapsulates information needed for planner to make a path. More...
Public Member Functions | |
| PlanRequest (Context *context, MotionInstant start, std::unique_ptr< MotionCommand > command, RobotConstraints constraints, std::unique_ptr< Path > prevPath, Geometry2d::ShapeSet obs, std::vector< DynamicObstacle > dObs, unsigned shellID, int8_t priority=0) | |
Public Attributes | |
| Context * | context |
| Allows debug drawing, position info. | |
| MotionInstant | start |
| Starting state of the robot. | |
| std::unique_ptr< MotionCommand > | motionCommand |
| Specific type of motion desired. | |
| RobotConstraints | constraints |
| Constraint parameters on motion. | |
| std::unique_ptr< Path > | prevPath |
| Last path planned or nullptr. | |
| Geometry2d::ShapeSet | obstacles |
| Static obstacles. | |
| std::vector< DynamicObstacle > | dynamicObstacles |
| Dynamic obstacles. | |
| unsigned | shellID |
| Shell ID used for debug drawing. | |
| int8_t | priority |
| Higher priority planned first. | |
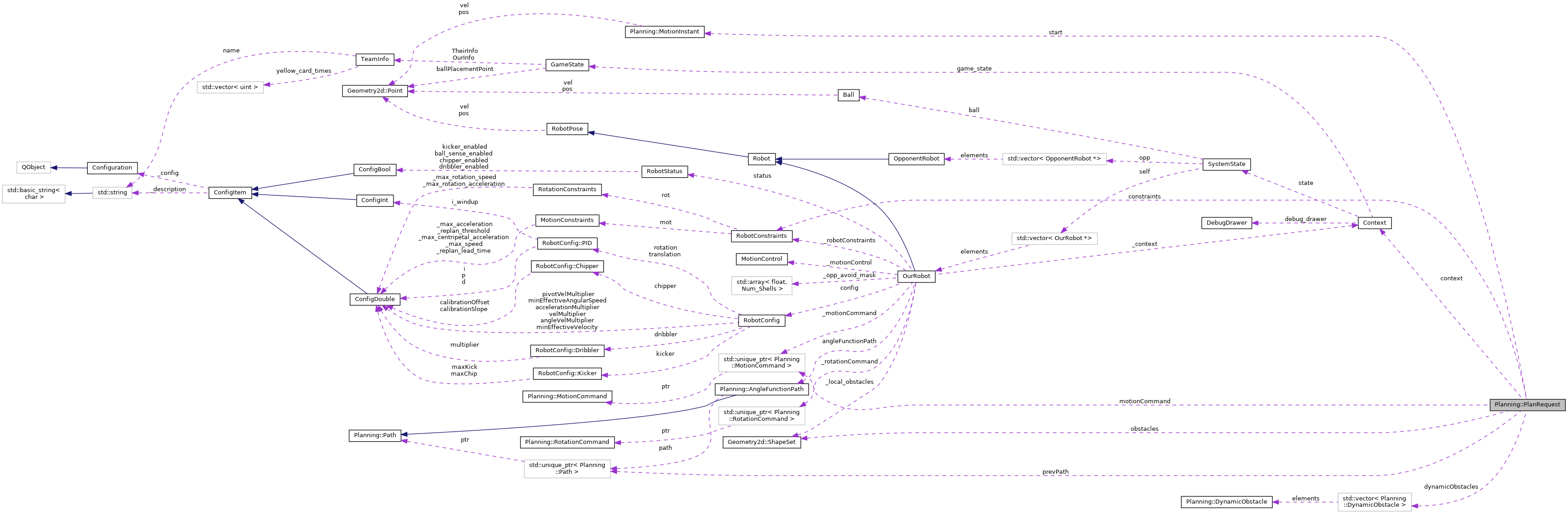
Encapsulates information needed for planner to make a path.
This struct contains ALL information necessary for a single robot path to be planned.
 Collaboration diagram for Planning::PlanRequest:
Collaboration diagram for Planning::PlanRequest: 1.8.13
1.8.13