|
GT RoboCup SSL
Soccer software, robot firmware
|
|
GT RoboCup SSL
Soccer software, robot firmware
|
Logitecch Gamepad/Joystick used to control robots. More...
Public Member Functions | |
| void | reset () override |
| Resets any stored values. More... | |
| void | update () override |
| Instructs the joystick to updates its values. | |
| JoystickControlValues | getJoystickControlValues () override |
| Returns the control values from this joystick. More... | |
| bool | valid () const override |
| Whether or not this Joystick is connected to a real device. | |
 Public Member Functions inherited from Joystick Public Member Functions inherited from Joystick | |
| int | getRobotId () |
| void | setRobotId (int rId) |
Static Public Attributes | |
| static std::vector< int > | controllersInUse = {} |
| static int | joystickRemoved = -1 |
| Static Public Attributes inherited from Joystick | |
| static ConfigDouble * | JoystickRotationMaxSpeed |
| static ConfigDouble * | JoystickRotationMaxDampedSpeed |
| static ConfigDouble * | JoystickTranslationMaxSpeed |
| static ConfigDouble * | JoystickTranslationMaxDampedSpeed |
Additional Inherited Members | |
| Static Public Member Functions inherited from Joystick | |
| static void | createConfiguration (Configuration *cfg) |
| Protected Member Functions inherited from Joystick | |
| QMutex & | mutex () |
| Protected Attributes inherited from Joystick | |
| int | robotId |
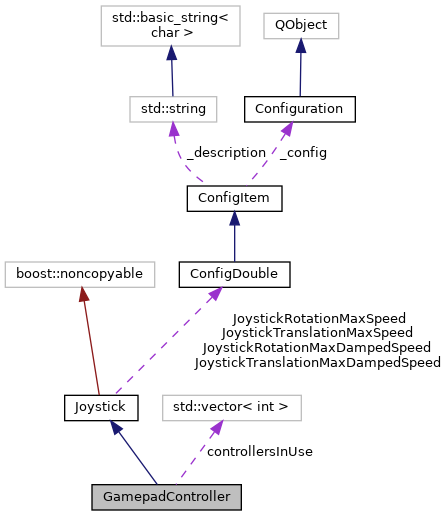
Logitecch Gamepad/Joystick used to control robots.
Inheritance diagram for GamepadController: Collaboration diagram for GamepadController:
|
overridevirtual |
Returns the control values from this joystick.
Note: The controls should be scaled between 0 and 1. The processor handles scaling to real world values.
Implements Joystick.
|
overridevirtual |
Resets any stored values.
Joysticks are reset whenever the robot they're controlling is switched
Implements Joystick.
 1.8.13
1.8.13