|
GT RoboCup SSL
Soccer software, robot firmware
|
|
GT RoboCup SSL
Soccer software, robot firmware
|

The ref module listens to a port for referee packets over the network. More...
Public Member Functions | |
| NewRefereeModule (Context *const ctx) | |
| void | stop () |
| void | getPackets (std::vector< NewRefereePacket *> &packets) |
| bool | kicked () |
| void | useExternalReferee (bool value) |
| bool | useExternalReferee () |
| void | blueTeam (bool value) |
| bool | blueTeam () |
| void | updateGameState (bool blueTeam) |
| void | spinKickWatcher () |
Public Attributes | |
| NewRefereeModuleEnums::Stage | stage |
| NewRefereeModuleEnums::Command | command |
| RJ::Time | sent_time |
| RJ::Time | received_time |
| RJ::Seconds | stage_time_left |
| int64_t | command_counter |
| RJ::Time | command_timestamp |
| TeamInfo | yellow_info |
| TeamInfo | blue_info |
Protected Types | |
| enum | KickDetectState { WaitForReady, CapturePosition, WaitForKick, VerifyKick, Kicked } |
Protected Member Functions | |
| virtual void | run () override |
| void | ready () |
Protected Attributes | |
| volatile bool | _running |
| KickDetectState | _kickDetectState |
| Geometry2d::Point | _readyBallPos |
| QTime | _kickTime |
| QMutex | _mutex |
| std::vector< NewRefereePacket * > | _packets |
| Context *const | _context |
| NewRefereeModuleEnums::Command | prev_command |
| NewRefereeModuleEnums::Stage | prev_stage |
| bool | _useExternalRef = false |
| bool | _blueTeam = false |
| float | ballPlacementx |
| float | ballPlacementy |
The ref module listens to a port for referee packets over the network.
Referee packets are sent out from the ssl-refbox program. You can see the protobuf packet for full details, but the packets contains info about which stage of the game it is, team scores, yellow/red cards, etc.
Each time a new packet arrives, the ref module updates the GameState object with the new information.
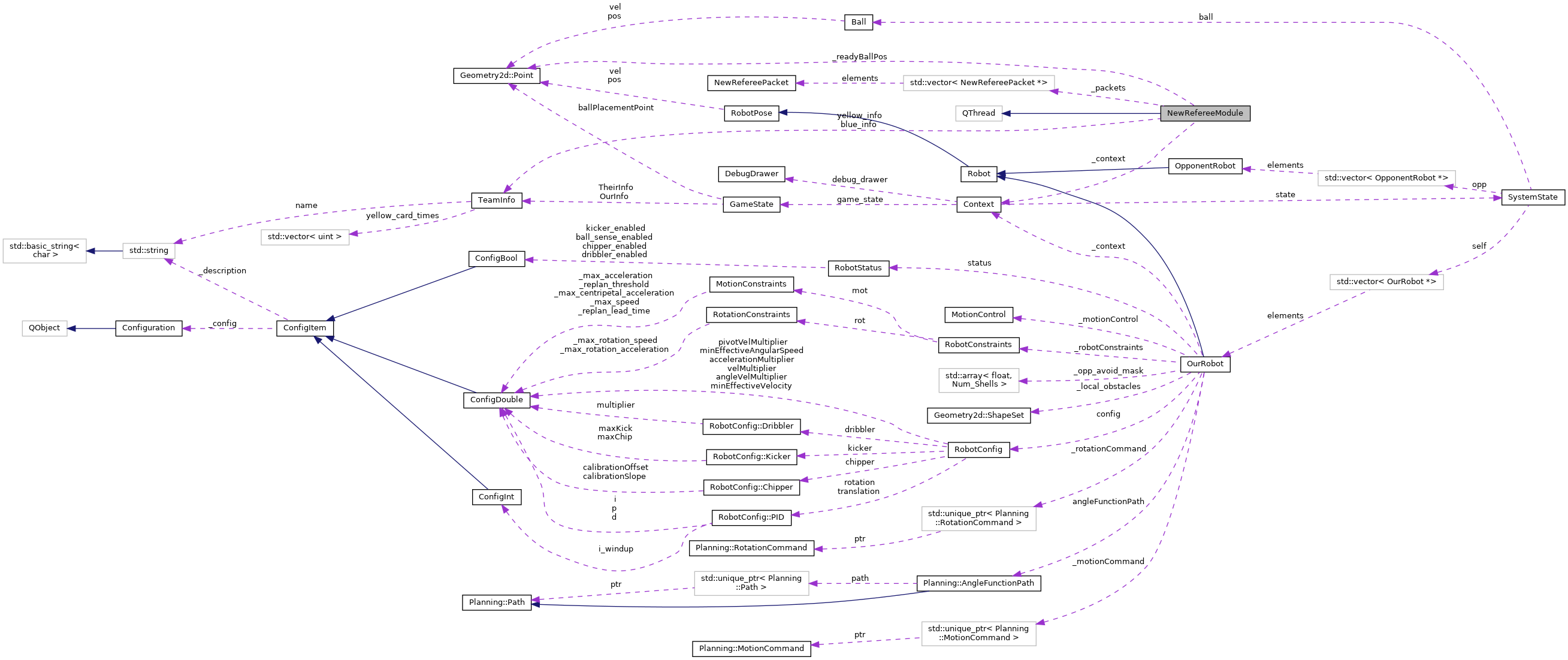
 Inheritance diagram for NewRefereeModule: Collaboration diagram for NewRefereeModule:
Inheritance diagram for NewRefereeModule: Collaboration diagram for NewRefereeModule:| void NewRefereeModule::spinKickWatcher | ( | ) |
Only run the kick detector when the ball is visible
Never kicked and not ready for a restart
 1.8.13
1.8.13