|
GT RoboCup SSL
Soccer software, robot firmware
|
|
GT RoboCup SSL
Soccer software, robot firmware
|

generic hierarchial state machine class. More...
Public Member Functions | |
| def | __init__ (self, start_state) |
| def | start_state (self) |
| def | restart (self) |
| Resets the FSM back into the start state. | |
| def | add_state (self, state, parent_state=None) |
| Registers a new state (which can optionally be a substate of an existing state) | |
| def | spin (self) |
| Runs the FSM checks transition conditions for all edges leading away from the current state if one evaluates to true, we transition to it if more than one evaluates to true, we throw a RuntimeError. | |
| def | add_transition |
| def | transition (self, new_state) |
| def | is_in_state (self, state) |
| def | state_is_substate (self, state, possible_parent) |
| def | corresponding_ancestor_state (self, ancestors) |
| def | ancestors_of_state (self, state) |
| def | as_graphviz (self) |
| def | write_diagram_png |
| def | state (self) |
generic hierarchial state machine class.
states can have substates. If the machine is in a state, then it is also implicitly in that state's parent state this basically provides for polymorphism/subclassing of state machines
There are three methods corresponding to each state:
Subclasses of StateMachine can optionally implement them and they will automatically be called at the appropriate times.
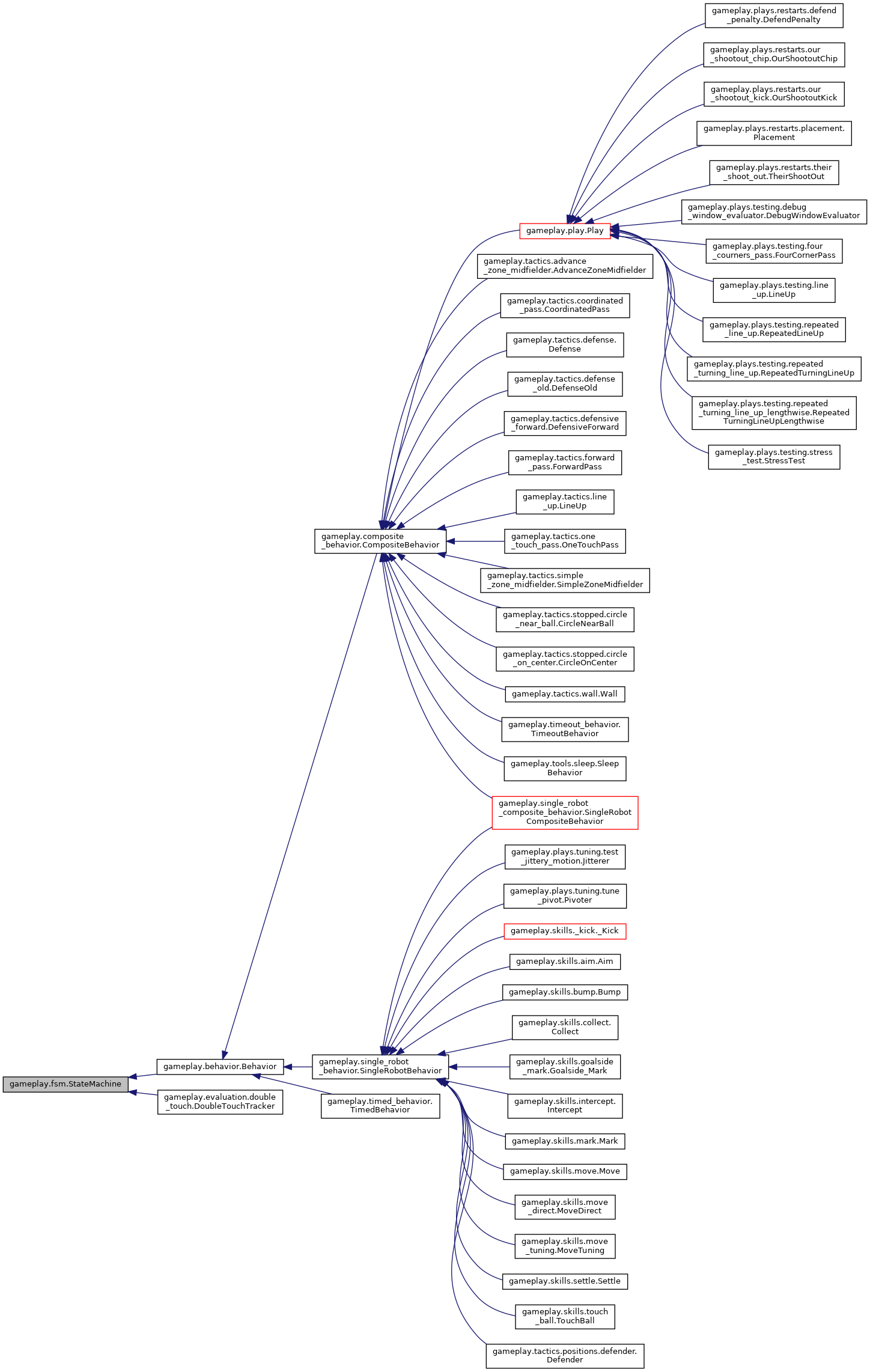
 Inheritance diagram for gameplay.fsm.StateMachine:
Inheritance diagram for gameplay.fsm.StateMachine: 1.8.13
1.8.13