|
GT RoboCup SSL
Soccer software, robot firmware
|
|
GT RoboCup SSL
Soccer software, robot firmware
|

The WindowEvaluator class calculates open shots from a point to a target. More...
Public Member Functions | |
| WindowEvaluator (Context *context) | |
| Constructor. More... | |
| WindowingResult | eval_pt_to_pt (Geometry2d::Point origin, Geometry2d::Point target, float targetWidth) |
| Evaluates shot windows to a target point, using a virtual width for the target. More... | |
| WindowingResult | eval_pt_to_robot (Geometry2d::Point origin, Geometry2d::Point target) |
| Evaluates shot windows to a target point. More... | |
| WindowingResult | eval_pt_to_opp_goal (Geometry2d::Point origin) |
| Evaluates shot windows to the oponents goal segment. More... | |
| WindowingResult | eval_pt_to_our_goal (Geometry2d::Point origin) |
| Evaluates shot windows to our team's goal segment. More... | |
| WindowingResult | eval_pt_to_seg (Geometry2d::Point origin, Geometry2d::Segment target) |
| Evaluates shot windows to a target segment. More... | |
Static Public Member Functions | |
| static void | createConfiguration (Configuration *cfg) |
| Initializes configurable fields. More... | |
Public Attributes | |
| bool | debug = false |
| Controls the debug drawings generated by the evaluator | |
| bool | chip_enabled = false |
| Controls whether the evaluator should consider chip shots possible. | |
| double | max_chip_range = 0.3 |
| Maximum distance to an obstacle to be able to chip over it. | |
| double | min_chip_range = 4.0 |
| Minimum distance to an obstacle to be able to chip over it. | |
| std::vector< Robot * > | excluded_robots |
| Robots that should not be considered obstacles during evaluation. | |
| std::vector< Geometry2d::Point > | hypothetical_robot_locations |
| Locations to pretend are robot obstacles during evaluation. | |
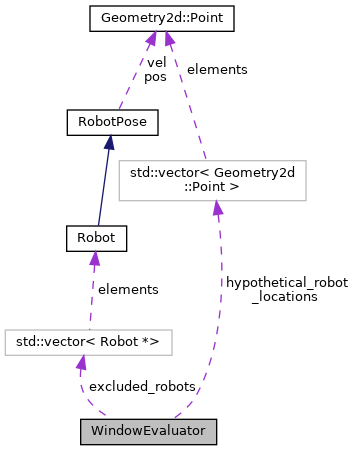
The WindowEvaluator class calculates open shots from a point to a target.
 Collaboration diagram for WindowEvaluator:
Collaboration diagram for WindowEvaluator:| WindowEvaluator::WindowEvaluator | ( | Context * | context | ) |
Constructor.
| systemState | pointer to global system state object |
|
static |
Initializes configurable fields.
| WindowingResult WindowEvaluator::eval_pt_to_opp_goal | ( | Geometry2d::Point | origin | ) |
Evaluates shot windows to the oponents goal segment.
| origin | The starting point of the shot |
| WindowingResult WindowEvaluator::eval_pt_to_our_goal | ( | Geometry2d::Point | origin | ) |
Evaluates shot windows to our team's goal segment.
| origin | The starting point of the shot |
| WindowingResult WindowEvaluator::eval_pt_to_pt | ( | Geometry2d::Point | origin, |
| Geometry2d::Point | target, | ||
| float | targetWidth | ||
| ) |
Evaluates shot windows to a target point, using a virtual width for the target.
| origin | The starting point of the shot |
| target | The target point to aim at |
| targetWidth | Virtual width to apply to the target |
| WindowingResult WindowEvaluator::eval_pt_to_robot | ( | Geometry2d::Point | origin, |
| Geometry2d::Point | target | ||
| ) |
Evaluates shot windows to a target point.
| origin | The starting point of the shot |
| target | The target point to aim at |
| WindowingResult WindowEvaluator::eval_pt_to_seg | ( | Geometry2d::Point | origin, |
| Geometry2d::Segment | target | ||
| ) |
Evaluates shot windows to a target segment.
| origin | The starting point of the shot |
| target | The target segment to aim at |
 1.8.13
1.8.13