|
GT RoboCup SSL
Soccer software, robot firmware
|
|
GT RoboCup SSL
Soccer software, robot firmware
|

Represents a motion path as a series of {pos, vel} pairs. More...
Classes | |
| struct | Entry |
| Each entry in InterpolatedPath is a MotionInstant and the time that the robot should be at that position and velocity. More... | |
Public Member Functions | |
| InterpolatedPath () | |
| default path is empty | |
| InterpolatedPath (Geometry2d::Point p0) | |
| constructor with a single point | |
| InterpolatedPath (Geometry2d::Point p0, Geometry2d::Point p1) | |
| constructor from two points | |
| void | addInstant (RJ::Seconds time, MotionInstant instant) |
| Adds an instant at the end of the path for the given time. More... | |
| virtual RobotInstant | start () const override |
| Start instant of the path. | |
| virtual RobotInstant | end () const override |
| Destination instant of the path. | |
| virtual bool | hit (const Geometry2d::ShapeSet &obstacles, RJ::Seconds startTimeIntoPath, RJ::Seconds *hitTime) const override |
| Returns true if the path hits an obstacle. More... | |
| virtual std::unique_ptr< Path > | subPath (RJ::Seconds startTime=RJ::Seconds::zero(), RJ::Seconds endTime=RJ::Seconds::max()) const override |
| Returns a subPath. More... | |
| virtual void | draw (DebugDrawer *constdebug_drawer, const QColor &color, const QString &layer) const override |
| Draws the path. More... | |
| virtual RJ::Seconds | getDuration () const override |
| Returns how long it would take for the entire path to be traversed. More... | |
| virtual std::unique_ptr< Path > | clone () const override |
| Returns a deep copy of the Path. | |
| bool | empty () const |
| void | clear () |
| Erase all path contents. | |
| float | length (unsigned int start=0) const |
| Calulates the length of the path. More... | |
| float | length (unsigned int start, unsigned int end) const |
| Calulates the length of the path. More... | |
| float | length (Geometry2d::Point pt) const |
| Returns the length of the path from the closet point found to pt. | |
| size_t | size () const |
| Returns number of waypoints. | |
| int | nearestIndex (Geometry2d::Point pt) const |
| Geometry2d::Segment | nearestSegment (Geometry2d::Point pt) const |
| returns the nearest segement of pt to the path | |
| float | distanceTo (Geometry2d::Point pt) const |
| RJ::Seconds | getTime (int index) const |
| Estimates how long it would take for the robot to get to a certain point in the path using Trapezoidal motion. More... | |
 Public Member Functions inherited from Planning::Path Public Member Functions inherited from Planning::Path | |
| Path (RJ::Time startTime=RJ::now()) | |
| std::optional< RobotInstant > | evaluate (RJ::Seconds t) const |
| This method evaluates the path at a given time and returns the target angle, position, and velocity of the robot. More... | |
| RJ::Seconds | getSlowedDuration () const |
| virtual void | setDebugText (QString string) |
| virtual void | drawDebugText (DebugDrawer *debug_drawer, const QColor &color=Qt::darkCyan, const QString &layer="PathDebugText") const |
| virtual RJ::Time | startTime () const |
| The time the path starts at. | |
| virtual void | setStartTime (RJ::Time t) |
| virtual bool | pathsIntersect (const std::vector< DynamicObstacle > &paths, RJ::Time startTime, Geometry2d::Point *hitLocation, RJ::Seconds *hitTime) const |
| virtual std::unique_ptr< ConstPathIterator > | iterator (RJ::Time startTime, RJ::Seconds deltaT) const |
| void | slow (float multiplier, RJ::Seconds timeInto=RJ::Seconds::zero()) |
Static Public Member Functions | |
| static std::unique_ptr< Path > | emptyPath (Geometry2d::Point pos) |
Public Attributes | |
| std::vector< Entry > | waypoints |
Protected Member Functions | |
| virtual std::optional< RobotInstant > | eval (RJ::Seconds t) const override |
Additional Inherited Members | |
| Protected Attributes inherited from Planning::Path | |
| double | evalRate = 1.0 |
| RJ::Time | _startTime |
| std::optional< QString > | _debugText |
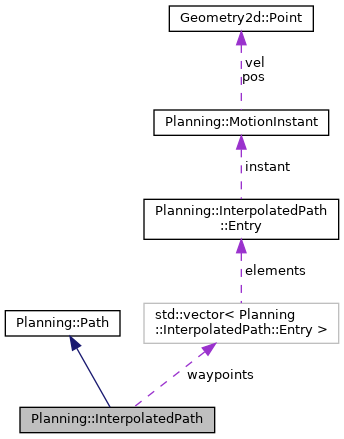
Represents a motion path as a series of {pos, vel} pairs.
The path represents a function of position given time that the robot should follow. A line-segment-based path comes from the planner, then we use cubic bezier curves to interpolate and smooth it out. This is done via the evaulate() method.
Inheritance diagram for Planning::InterpolatedPath: Collaboration diagram for Planning::InterpolatedPath:
|
inline |
Adds an instant at the end of the path for the given time.
Time should not bet less than the last time.
|
overridevirtual |
Draws the path.
The default implementation adds a DebugRobotPath to the SystemState that interpolates points along the path.
| debug_drawer | The SystemState to draw the path on |
| color | The color the path should be drawn |
| layer | The layer to draw the path on |
Reimplemented from Planning::Path.
|
overridevirtual |
Returns how long it would take for the entire path to be traversed.
Implements Planning::Path.
| RJ::Seconds Planning::InterpolatedPath::getTime | ( | int | index | ) | const |
Estimates how long it would take for the robot to get to a certain point in the path using Trapezoidal motion.
| index | Index of the point on the path |
|
overridevirtual |
Returns true if the path hits an obstacle.
| [in] | shape | The obstacles on the field |
| [out] | hitTime | the approximate time when the path hits an obstacle. If no obstacles are hit, behavior is undefined for the final value. |
| [in] | startTimeIntoPath | The time on the path to start checking from |
Implements Planning::Path.
| float Planning::InterpolatedPath::length | ( | unsigned int | start = 0 | ) | const |
Calulates the length of the path.
| [in] | start | Index of point in path to use at start point. |
| float Planning::InterpolatedPath::length | ( | unsigned int | start, |
| unsigned int | end | ||
| ) | const |
Calulates the length of the path.
| [in] | start | Index of point in path to use at start point. |
| [in] | end | Index of point in path to use at end point. |
|
overridevirtual |
Returns a subPath.
| startTime | The startTime for from which the subPath should be taken. |
| endTime | The endTime from which the subPath should be taken. If it is greater than the duration fo the path, it should go to the end of the path. |
Implements Planning::Path.
 1.8.13
1.8.13